한기대(총장 유길상)메카트로닉스공학부 박진형 교수 연구팀의 연구논문이 한국정밀공학회가 발간하는 기계소재 분야 국제저명학술지인 ‘International Journal of Precision Engineering and Manufacturing-Green Technology(IJPEM-GT)’ 7월호 ‘편집장 우수논문’으로 선정됐다.
연구논문 제목은 ‘저주파 기계적 자극을 통해 구동되는 마찰 전기 기반 필름형 소프트 로봇(Triboelectric-Based Film-Type Soft Robot Driven via Low-Frequency Mechanical Stimuli)’이다. 연구팀은 박진형 교수를 비롯해 지성호, 신재희 대학원생 등 3명이다.
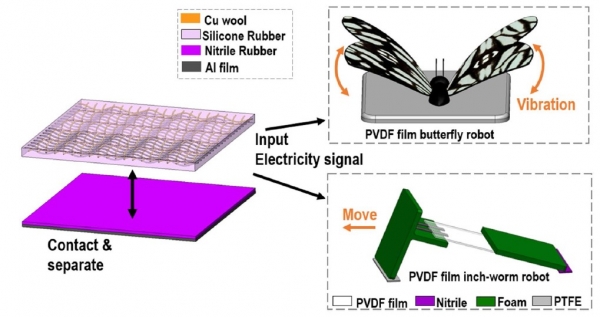
박진우 교수는 “연구진은 폴리비닐리덴 플로라이드(PVDF) 필름을 기반으로 한 압전소자 액추에이터와 공진 구조 설계를 통한 자가 동작 곤충 모사 소프트 로봇 구동 기술을 개발했다”면서 “실험분석을 바탕으로 최적의 매개변수 설계와 공진설계를 통해 소프트로봇의 움직임을 효과적으로 증대시킬 수 있는 설계 가이드라인을 제시했다”고 밝혔다.
이어 “전원 공급이 어려운 환경에서 소프트 로봇의 자가 동작 기초 연구로서 활용을 기대한다”고 덧붙였다.
이번에 개발한 필름형 소프트로봇은 PVDF 필름 액추에이터로 구동되며 외부 전원 없이 마찰대전 정전기 발전 솔루션을 동력으로 활용한다. 나비 및 자벌레 형태의 소프트 로봇은 공진 구조 파라미터 설계와 실험적 검증을 통해 소프트 곤충 로봇 움직임을 효과적으로 개선하여 구동하였다.
이번 연구는 한국연구재단과 정보통신기획평가원의 지원을 받아 수행됐으며, 논문은 ‘23년 9월30일까지 무료 다운로드가 가능하다.
